A team from MIT is working on a robot control interface which currently detects eight navigation gestures using the hand and arm muscles. This system which allows fine maneuvers opens promising perspectives for cobotics.
Work on human-machine interfaces to control robots or drones sometimes takes surprising paths. After the drone piloted with the eyes , several drones controlled simultaneously by the thought , here is the drone controlled by the muscles and the movements of the arm. The project comes from the famous Computer Science & Artificial Intelligence Lab (CSAIL) of MIT which explores in particular the solutions likely to advance cobotic, that is to say human-robot collaboration.
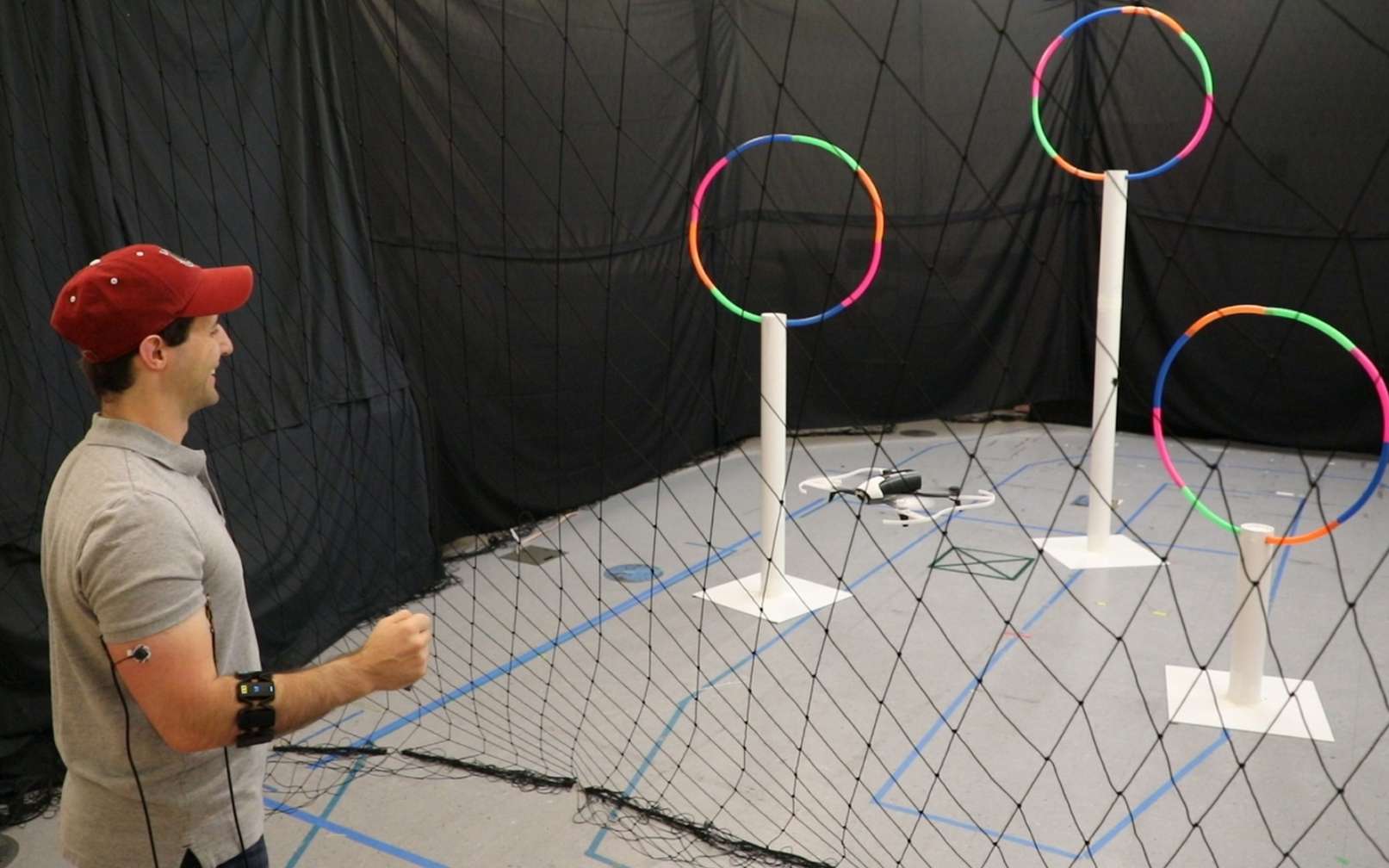
Using a motion sensor and electrodes that detect hand movements and contraction of the triceps and biceps ( electromyography ), the current system recognizes eight predefined navigation gestures. As you can see in the video below, the control allows precise maneuvers and the latency between the command and its execution is relatively short.
A plug and play system without prior calibration
According to the authors of this experiment, the drone recognized 81.6% of the gestures during this route. The system seems fairly intuitive: movement of the wrist to the right, left, up and down for basic directions, clenching the fist to command the drone to move forward, contracting the biceps and triceps to order it to immobilize. The other big advantage is that the system does not require prior calibration .
The CSAIL researchers describe a “ plug and play ” system based on an automatic learning algorithm which processes data in real time through a neural network trained thanks to the gestures of previous users. The system can calibrate to each person’s signals, allowing anyone to equip the sensors and start maneuvering the drone directly.
” Allowing machines to interpret non-verbal commands such as gestures can help make interactions more similar to those with another person, ” say the study authors in their article published by Association for Computing Machinery .