A team of researchers and students from the School of Computer Intelligence Engineers (EPITA) has been working for several years on an innovative underwater drone. Called Ryujin, it is the smallest hybrid drone – piloted or autonomous – capable of carrying out cartographic surveys of the seabed.
To map the ground, aerial drones generally use photogrammetry. It is then necessary to combine several viewing angles to reconstruct the relief of an area. A well-established and efficient process for 3D modeling of the ground surface. However, doing the same thing on the seabed remains problematic. The fault is much more difficult visibility and also a moving marine flora such as, for example, algae . The other big concern with a drone devoid of a wired link with the surface is the autonomy and the poor transmission of waves through water. Finally, to take a starting point, geographically position the drone via GPS is practically impossible, since the signal is altered by water.
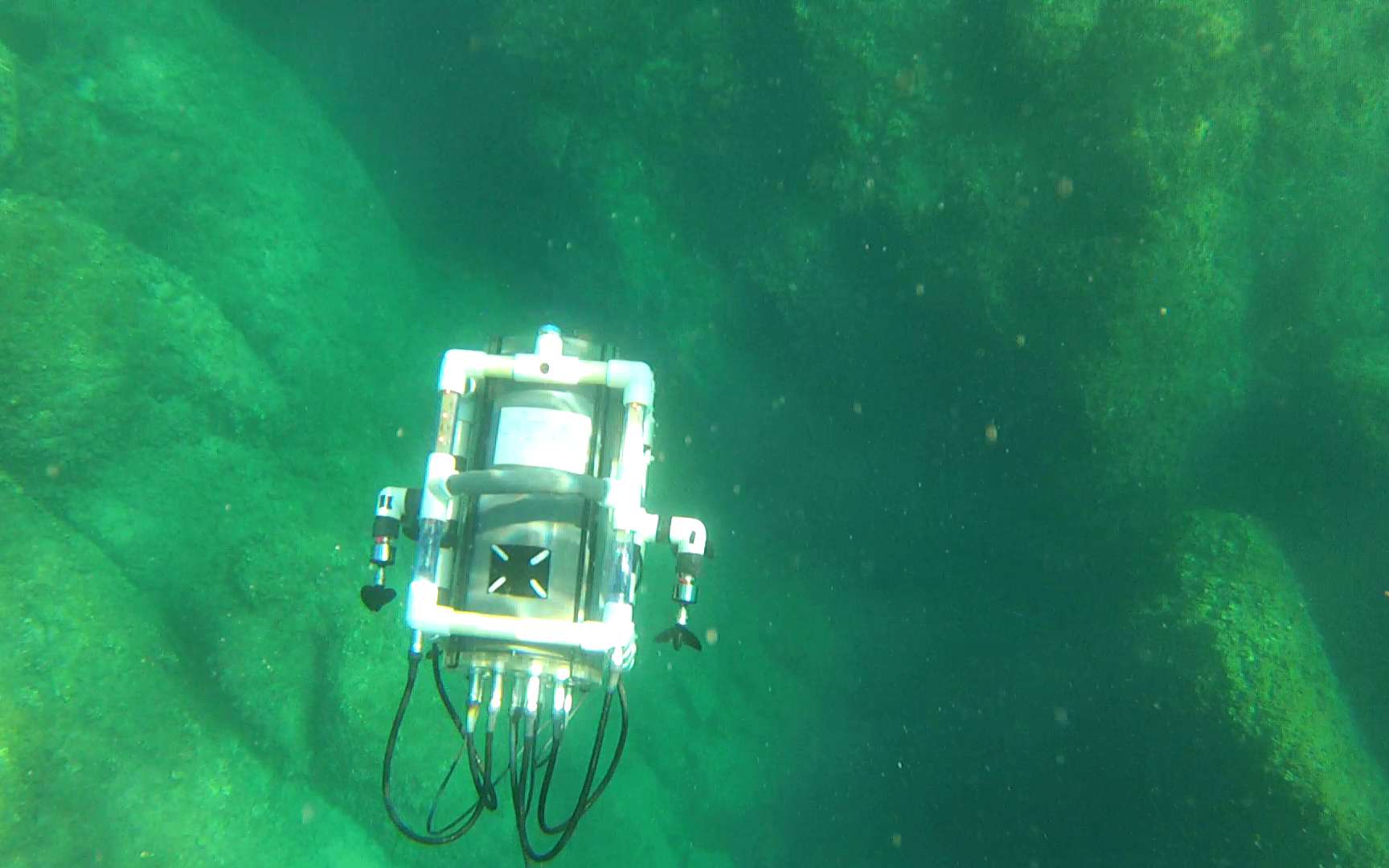
This is a problem that EPITA has been working on since 2017 with its research team in exploration robotics Sense Explore Analysis and Learn ( SEAL ). Led by two teacher-researchers, Loïca Avanthey and Laurent Beaudoin, the team developed a prototype underwater drone called Ryujin, a Japanese word which means ” water dragon “. It is certainly not the first underwater drone , but it has advantages that are sufficiently exclusive to stand out regularly during competitions.
Unlike the other models which are bulky and not very autonomous , Ryujin is compact with 20 cm of height and width for 30 cm of length. It weighs only 9 kg , while underwater drones are generally around 60 kg. ” This is due to a real technological breakthrough in terms of the engine,” according to Laurent Beaudoin. The researcher explains that instead of ” enclosing the motors in a box which weighs down the drone , they are submerged. These are ” brushless ” models like those found on aerial drones “. Therefore, this lightening of the structure also offers extended autonomy since, according to scientists, ” the drone can sail underwater for two hours” .
The smallest underwater drone
Another advantage, while underwater robots are generally connected to a cable on the surface and therefore limited in their range, Ryujin is a hybrid drone that can be piloted or evolve autonomously at the bottom from the sea over large areas. For the moment, the drone can reach a theoretical maximum depth of 100 meters and has been tested at sea up to 50 meters.
Finally, the drone is much less expensive than other models often already available turnkey. This floor price requires a more efficient software code to compensate for less substantial sensor equipment . It is therefore, especially at the software level, that the work of researchers is most complicated.
To manage to model the funds, Loïca Avanthey explains that the team has developed ” an algorithm inspired by the air and adapted to the constraints of the underwater world” . To alleviate the difficulties of geographic surveys linked to movementsalgae, the team continues to develop with the use of several photos synchronized with two viewing angles. Data processing is one of the main tasks of the students working on the development of this drone. Within two to three years, they plan to develop the algorithms so that the drone becomes fully autonomous.
Ryujin is regularly awarded in robotics competitions bringing together scientific and industrial laboratories. Last July, it was presented to the ERL ( European Robotics League ) which was held on a NATO base in Italy. The participating team, made up of students in L3 and M1 and two teacher-researchers, managed to obtain four prizes.
For the two teacher-researchers, in addition to mapping the seabed in 3D for the needs of biologists or archaeologists, this drone can also be used to check the anchor points of buoy attachments in order to know whether to replace them . In this case, it makes it possible to make a first pass to remove the doubt before sending a diver. It can also be used to quickly check the solidity of docks on stilts .